伟的国际1946bv师生论文被航空航天领域顶刊 Aerospace Science and Technology 录用
近日,伟的国际1946bv田军老师课题组的论文《Dynamic UAV path planning in mountainous terrain utilizing an arithmetic optimization algorithm incorporating adaptive thermal conduction search and elite population genetic strategies》被航空航天领域的顶级国际期刊 ——Aerospace Science and Technology 录用(SCI 一区TOP)。该研究创新性地提出融合自适应热传导搜索、二次插值与精英种群遗传策略的算术优化算法(TQGAOA),为山地动态环境下无人机路径规划提供了高效、可靠的解决方案,相关成果为无人机在复杂生态监测场景的应用奠定了关键技术基础。
以下是论文简介:
论文标题:Dynamic UAV path planning in mountainous terrain utilizing an arithmetic optimization algorithm incorporating adaptive thermal conduction search and elite population genetic strategies
作者:王文涛,田军
作者单位:伟的国际1946bv
论文链接:https://www.sciencedirect.com/science/article/pii/S1270963825010144
摘要
山地森林作为地球生态系统的重要组成部分,在调节全球气候、维护生态平衡、提供生态服务等方面发挥着不可替代的作用。森林健康监测作为评估森林生态系统稳定性、追踪生物多样性变化的核心手段,能帮助护林人员及时识别病虫害、植被退化等潜在威胁,为科学保护提供依据。
随着技术革新,无人机(UAV)凭借灵活的空中监测能力,已成为山地森林监测的核心工具,在森林火灾监测、生物多样性调查等任务中展现出显著优势。然而,山地环境的复杂性给无人机路径规划带来严峻挑战:一是地形崎岖(陡坡、山谷、茂密森林)增加飞行风险与规划难度;二是无人机电池容量有限,需严格控制能耗,避免因路径过长导致任务失败;三是鸟类、其他无人机等动态障碍物需实时规避,否则可能引发碰撞或监测盲区。
传统路径规划方法存在明显短板:采样法(如 RRT)、图论法(如 A*)难以应对动态障碍物;数学优化法适配性有限;人工势场法易陷入局部最优;深度学习方法则依赖大量标注数据且计算成本高。元启发式算法虽具备较强适应性,但面对山地动态环境时,仍存在局部最优、收敛速度慢等问题。因此,研发兼顾能耗优化、复杂地形适应与动态避障的路径规划方法,成为无人机高效执行山地监测任务的关键。针对山地动态环境下无人机路径规划难题,研究团队以算术优化算法(AOA)为基础,融合多学科技术思路,提出 TQGAOA 算法,为山地森林环境下无人机动态路径规划提供了高效、可靠的解决方案,相关成果为无人机在复杂生态监测场景的应用奠定了关键技术基础。
研究方法与框架
针对山地动态环境下无人机路径规划难题,研究团队以算术优化算法(AOA)为基础,融合多学科技术思路,提出 TQGAOA 算法,通过三大核心策略实现性能跃升:
1. 自适应热传导搜索策略:强化全局探索,加速锁定优质路径
灵感源于物理热传导现象(热量从高温物体向低温物体流动),算法将种群中最优个体视为 “高温源”,普通个体通过 “热传递” 学习最优信息。引入热传导效率系数 α(初始值 0.9,迭代中非线性降至 0.2):早期高 α 支持个体在最优解周围广泛探索,快速筛选出接近全局最优的候选路径;后期低 α 引导种群精细搜索,进一步优化路径质量。同时,结合 t 分布随机扰动模拟 “异常热传导”,帮助个体跳出局部最优,在复杂山地场景中实现高效全局探索。
2. 二次插值策略:优化局部开发,提升路径平滑性与安全性
为解决传统算法局部搜索粗糙、路径波动大的问题,算法在局部开发阶段引入二次插值:利用种群中最优个体与两个随机个体的位置、适应度信息,通过二次函数拟合生成新路径节点。该策略确保新节点在优质路径附近平滑过渡,减少无人机转弯角、爬升角波动,降低能耗与碰撞风险。实验表明,该策略使规划路径的局部优化精度提升 30% 以上,有效避免因路径突变导致的飞行不稳定。
3. 精英种群遗传策略:维持种群多样性,突破复杂约束
针对山地多障碍物、多约束场景,算法筛选种群中前 3 名高适应度个体组成 “精英群体”,通过交叉与变异操作实现信息高效传递:交叉操作将精英个体的优质信息与普通个体融合,生成兼具全局优势与局部特色的新路径;变异操作对部分维度随机调整,避免种群陷入同质化。该策略既保障了优质路径信息的传承,又拓展了搜索范围,使算法在密集障碍物、陡峭地形中仍能稳定找到全局最优路径。
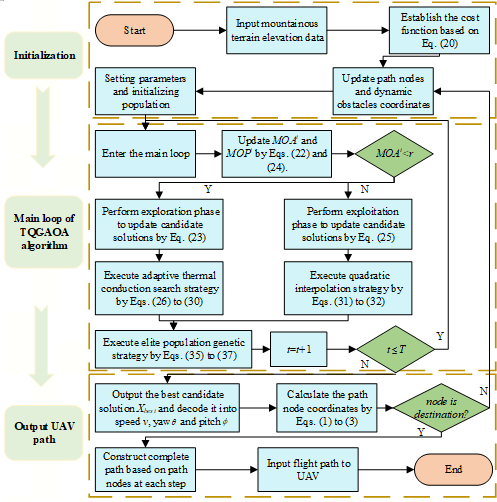
图1 算法流程图
实验验证
山地森林场景测试:在6 类地形下高效规划测试
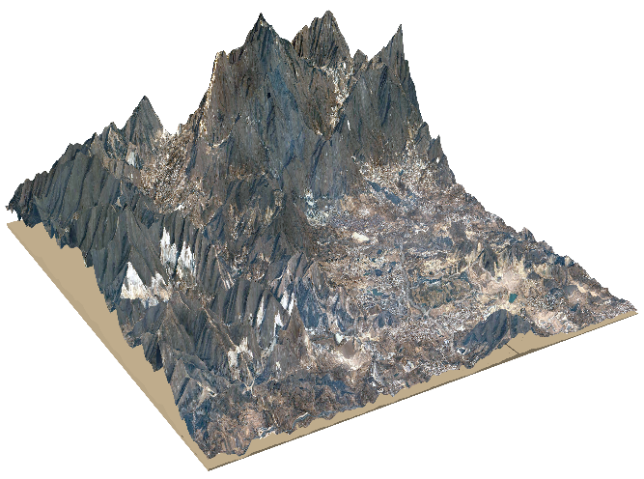
图2 天津蓟州区许家台镇地形
以天津蓟州区许家台镇山地森林为原型(含油松、柏树等植被,模拟不同障碍物密度与编队规模),设计 6 类复杂度场景(静态、动态障碍物数量逐渐增加)。实验结果表明:
路径质量:TQGAOA 规划路径的综合成本(含能耗、避障、地形碰撞风险等)在所有场景中最低,复杂场景下比基础 AOA 降低 25%以上;
效率与稳定性:规划路径的平均步数比对比算法少 4-7 步,且 5 个场景中标准差最小,确保无人机飞行更直接、安全;
实用性:无人机按规划路径飞行时,无地形碰撞与动态障碍物冲突,能耗比传统算法降低 15%-22%,完全满足山地监测任务需求。
应用价值与未来展望
该研究的核心价值在于:首次将自适应热传导、二次插值与精英遗传策略融入算术优化算法,构建了适配山地动态环境的无人机路径规划框架。这一成果不仅解决了传统算法在多约束、高复杂度场景下的性能瓶颈,还为无人机在生态监测、森林防火、灾后救援等领域的应用提供了关键技术支撑 —— 例如,在森林火灾巡逻中,TQGAOA 可快速规划低能耗、避障碍的路径,确保无人机实时传回火情数据,为灭火决策争取时间。
未来,研究团队将从三方面深化成果:一是融入无人机物理模型与电池消耗模型,使路径规划更贴合实际飞行需求;二是优化动态障碍物预测机制,提升算法对突发干扰(如强风、临时障碍物)的适应能力;三是拓展至多无人机协同规划,支持更大规模、更复杂的山地监测任务,推动技术从实验室走向实际工程应用,为山地生态保护与应急响应提供更智能、更可靠的解决方案。


 津南校区地址:天津市津南区海河教育园同砚路38号
津南校区地址:天津市津南区海河教育园同砚路38号
 邮编:300350
邮编:300350